Erzeugung einer kml-Datei für Google Earth aus einem Wegpunktflug des Koptertools
Beschreibung | kml-Datei erzeugen
Ansicht des Koptertools vs. Ansicht in Google Earth
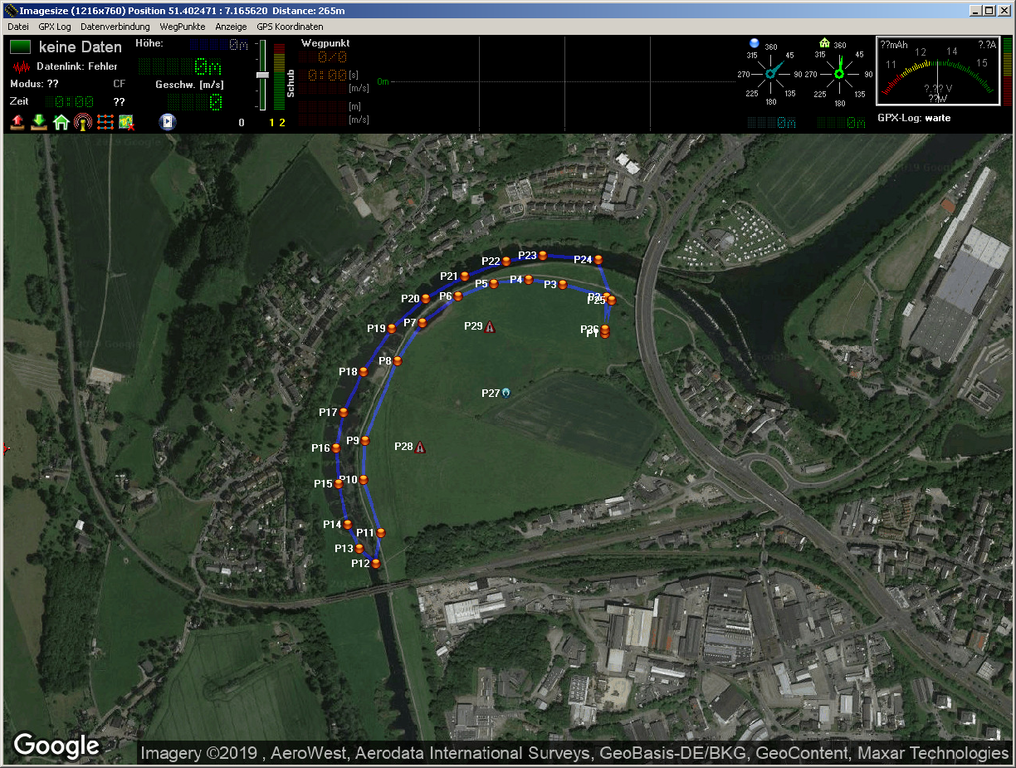
Mit dem Koptertool können Wegpunktflüge geplant werden.
Zusammen mit dem Wegpunkt-Editor stehen hilfreiche
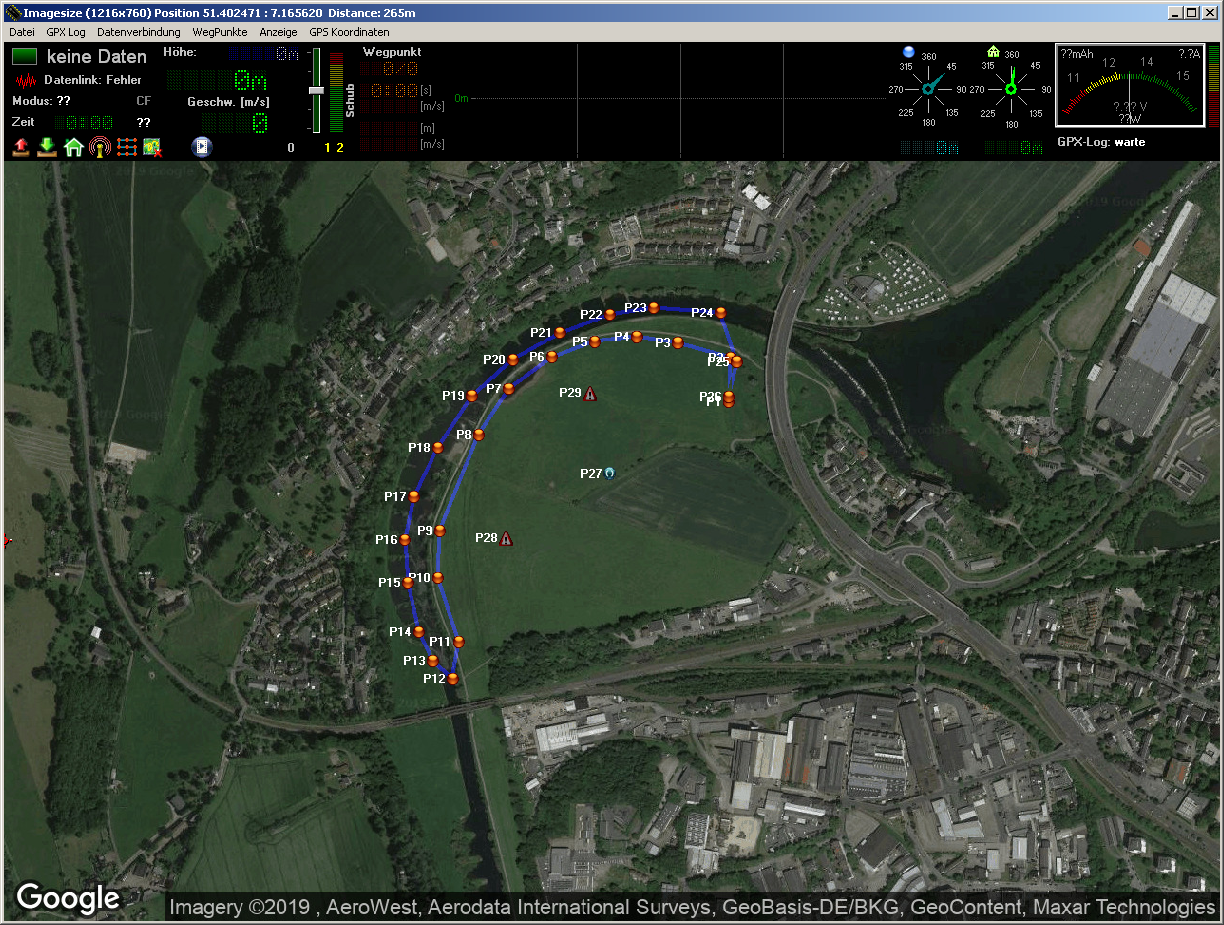
Werkzeuge zur Verfügung, die einen dabei gut unterstützen: Man kann die Punkte setzen und sich an der Karte orientieren.
Das sieht dann so aus:
Mir hat bei dieser Ansicht aber immer die Höhe gefehlt - diese wollte ich auf einen Blick sehen. Denn bei einem Fehler in der Planung rauscht der Kopter
nur allzu schnell in einen Baum, ein Gebüsch, einen Strommast oder gar ein Bauwerk.
Hier empfiehlt sich Google Earth. Das Programm bietet alles
was notwendig ist. Einziges Problem: Wie die vom Koptertool erzeugten Daten in
Google Earth
einlesen? Und Dinge wie
Steigrate, Blickrichtung und auch "Knicke" im Flugpfad sollten auch dargestellt werden. (Auf die "Knicke" gehe ich weiter unten noch ein)
Die Wegpunktdatei des Koptertools musste also in eine von
Google Earth
verstehbare kml-Datei konvertiert werden. Und nach der Konvertierung sah
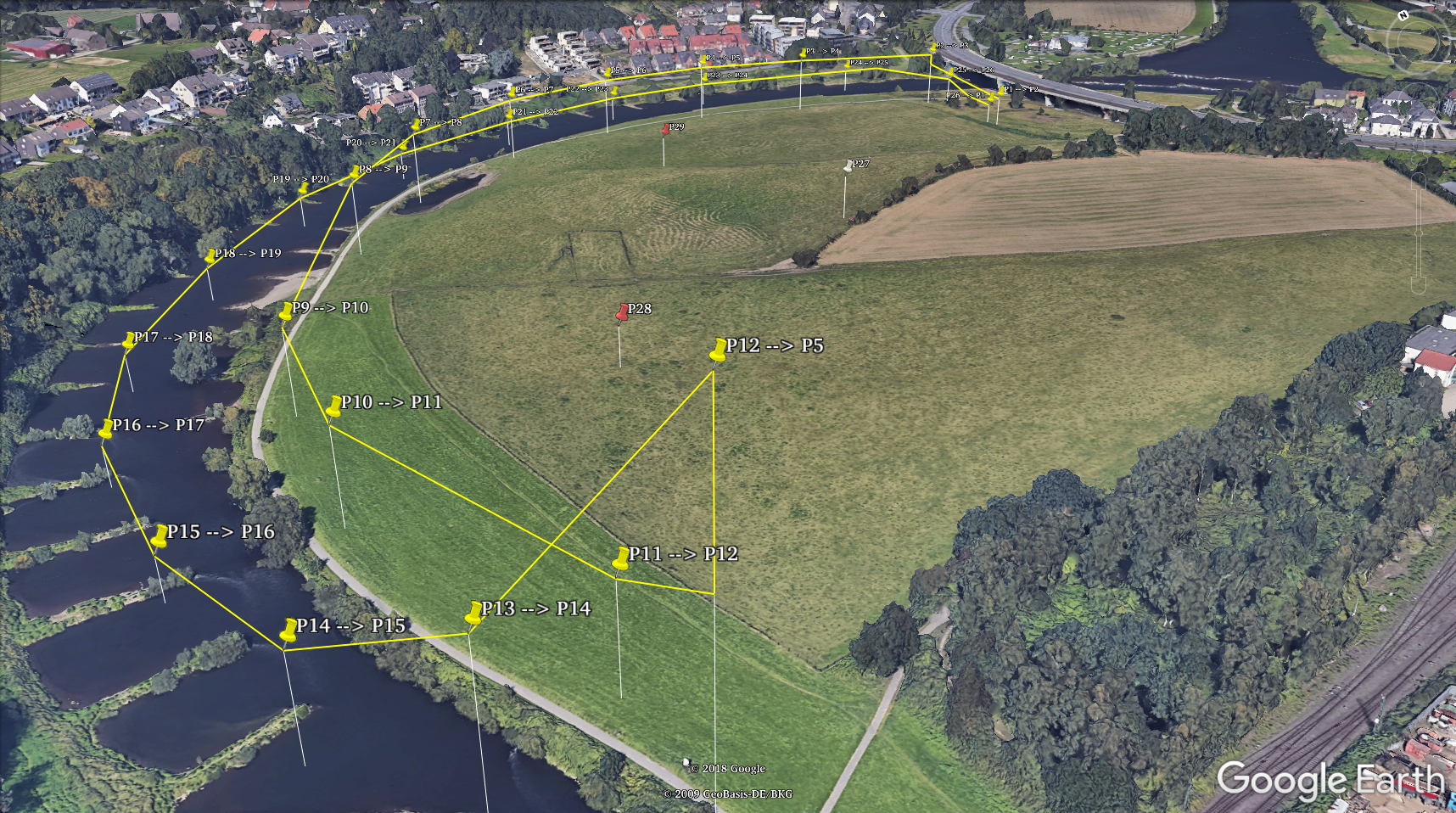
der obige Flug in Google Earth dann so aus:
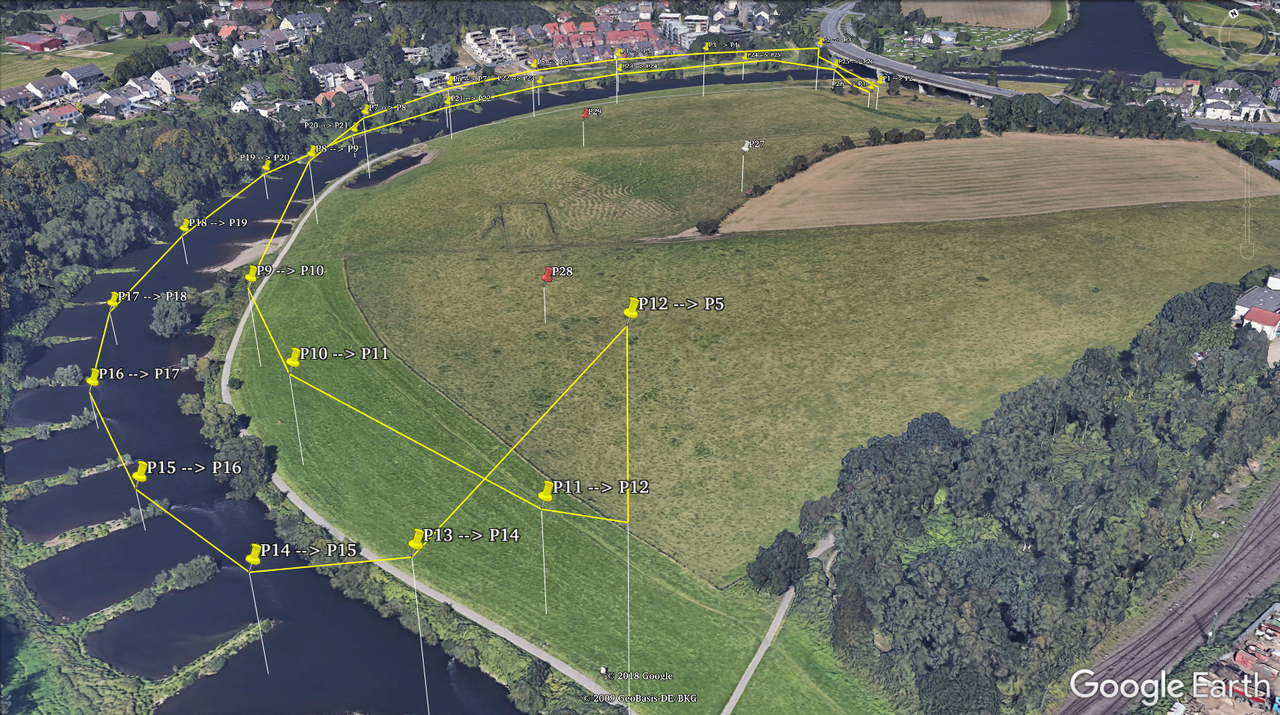
Man sieht den POI (weiß, Bildmitte, oberes Drittel. Er wird hier aber nicht weiter verwendet), die beiden Failsafe-Punkte und natürlich die Wegpunkte mit dem
gelben Flugpfad, auf dem sich der Kopter bewegt. Auch gut zu sehen ist der "Knick" im Flugpfad von P11 zu P12. Genau so wollte ich den geplanten Flug sehen.
Wenn man sich den Flugpfad weiter anschaut wird ersichtlich, dass es zum Teil recht nah an Bäumen vorbei geht. Dabei muss man immer dran denken, dass
die Genauigkeit von GPS keineswegs im Zentimeterbereich liegt, sondern bei einigen Metern. Schnell geht's dann ab in einen Baum.
Gut. Genug geredet, Praxis jetzt: Wer's direkt ausprobieren will: Hier ist die zugehörige kml-Datei Ruhrbogen.kml
Was zeigt die kml-Datei nun an?
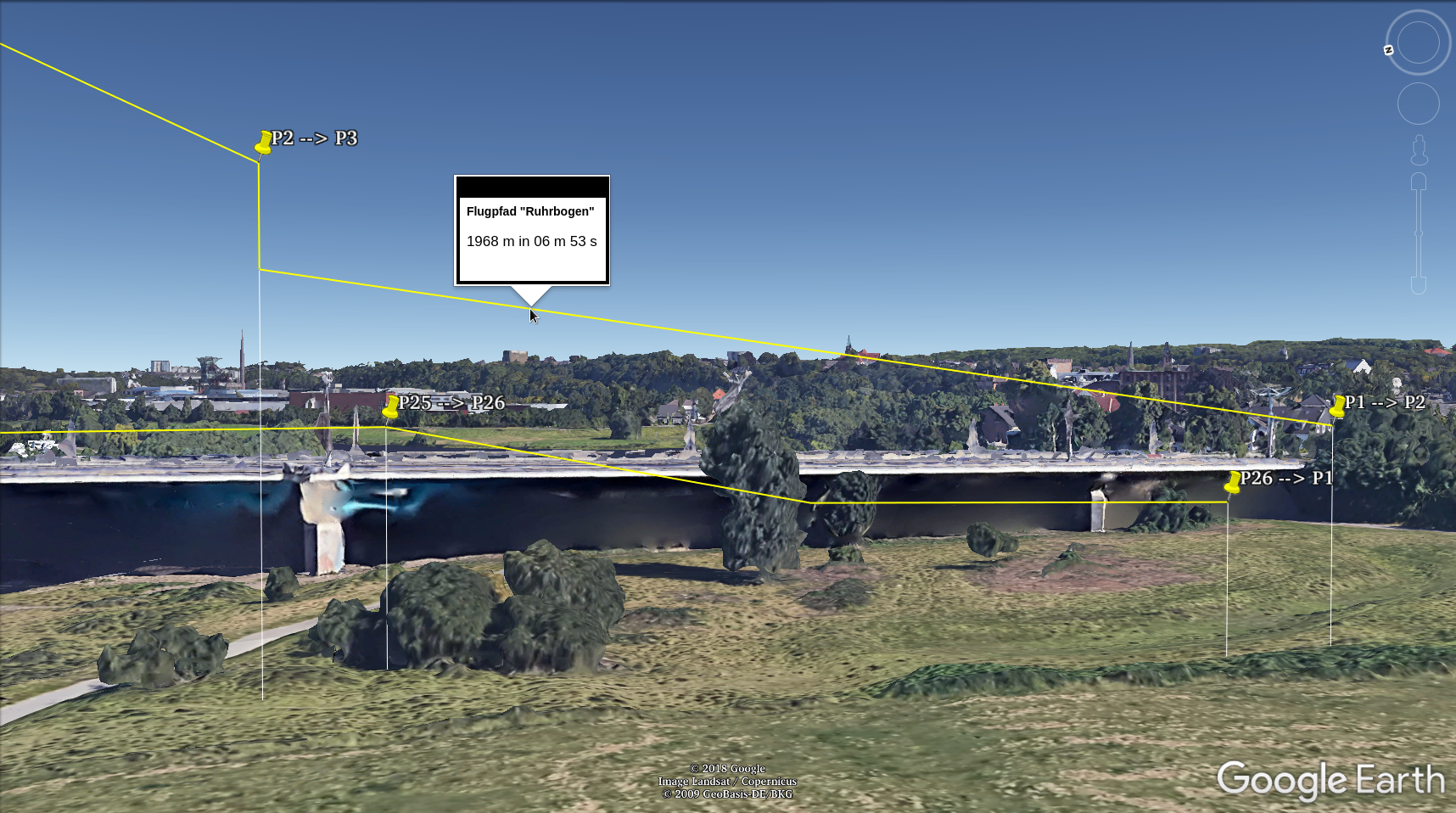
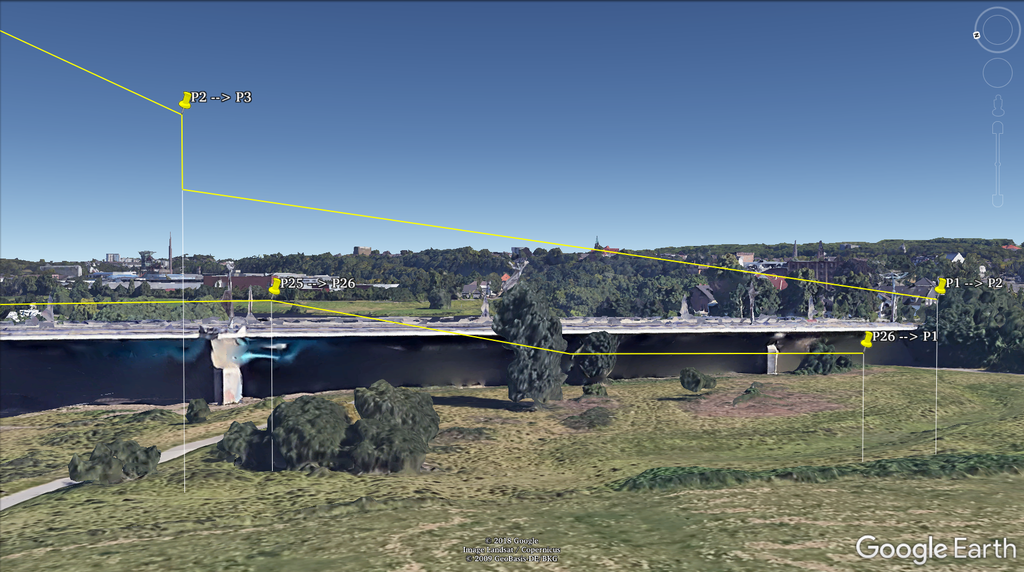
Flugpfad
Die gelbe Linie ist der Flugpfad. Der Knick unterhalb von P2 zeigt, dass die Position von P2 vor der Höhe von P2 erreicht wird. Der Kopter steht hier
also auf der Stelle während er zu P2 aufsteigt.
Klickt man mit der Maus auf den Flugpfad erscheint eine Infobox:
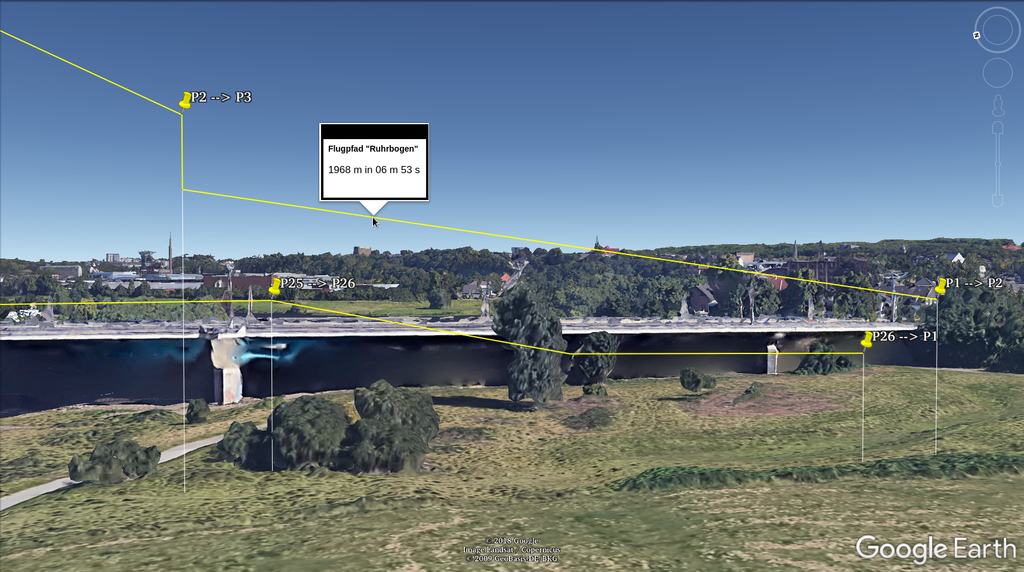
Angezeigt wird
- die gesamte Flugdistanz vom 1. bis zum letzten Punkt (ohne POIs und Failsafe-Punkte, diese sind ja nicht Teil des Fluges), und die
- Flugdauer. Diese berücksichtigt Steigraten (die "ClimbRate") und Geschwindigkeit ("Speed"). Bei den beiden Größen gibt es 2 Sonderfälle:
- Steigrate=0: Hierbei muss manuell eine geeignete Flughöhe hergestellt werden. Bei diesem Sonderfall wird die Höhe der Wegpunkte für die
Berechnung der Flugdauer nicht berücksichtigt.
- Geschwindigkeit=255: Heißt, der Kopter fliegt mit "Vollgas". Nur was ist "Vollgas"? 20 m/s? Gar 30? Ich gehe bei der Flugdauerberechnung von 20 m/s
aus, das sind immerhin über 70 km/h. Sollten 20 m/s falsch sein lasse ich mich gerne korrigieren:
"Vollgas-Korrektur"
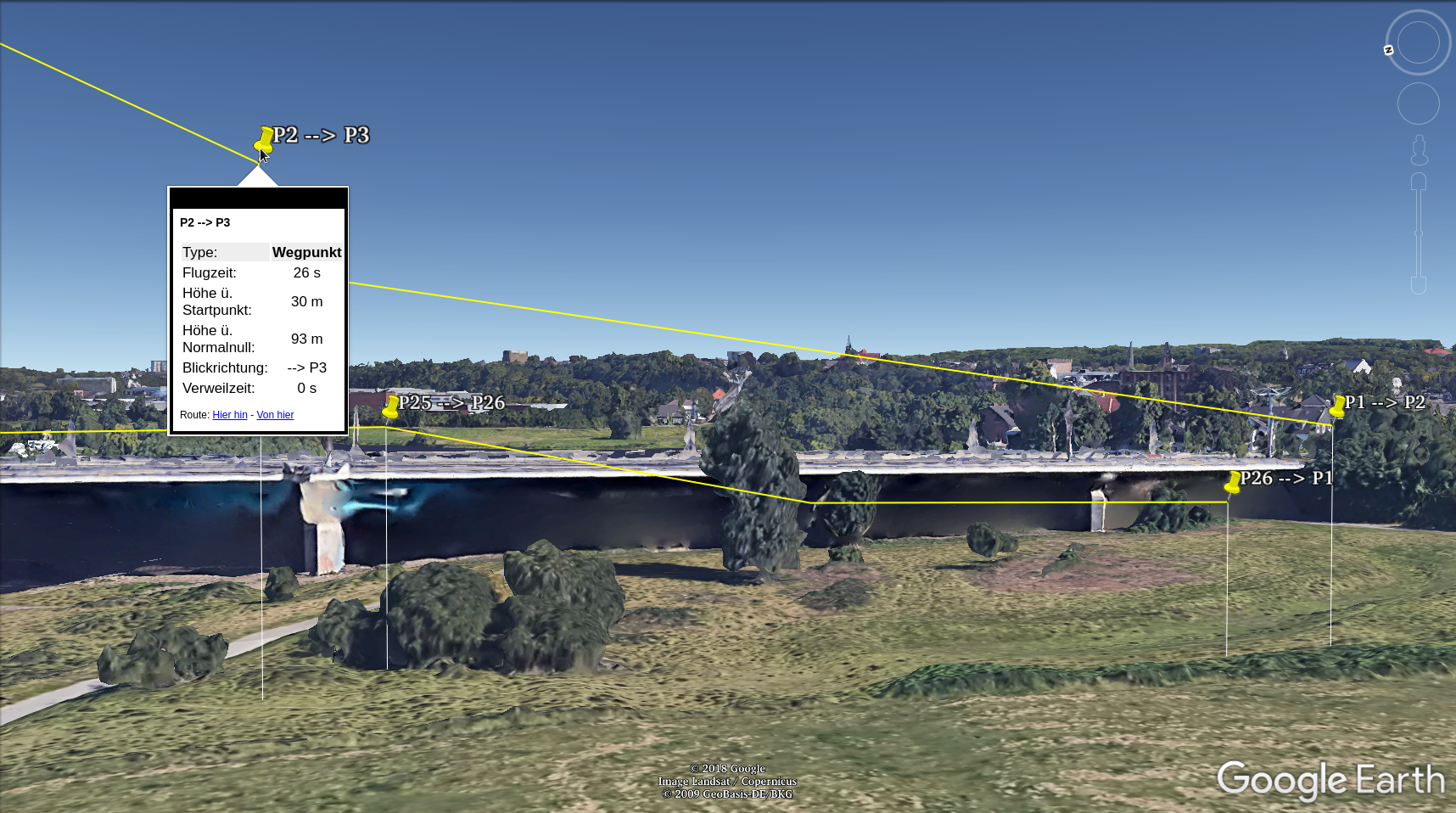
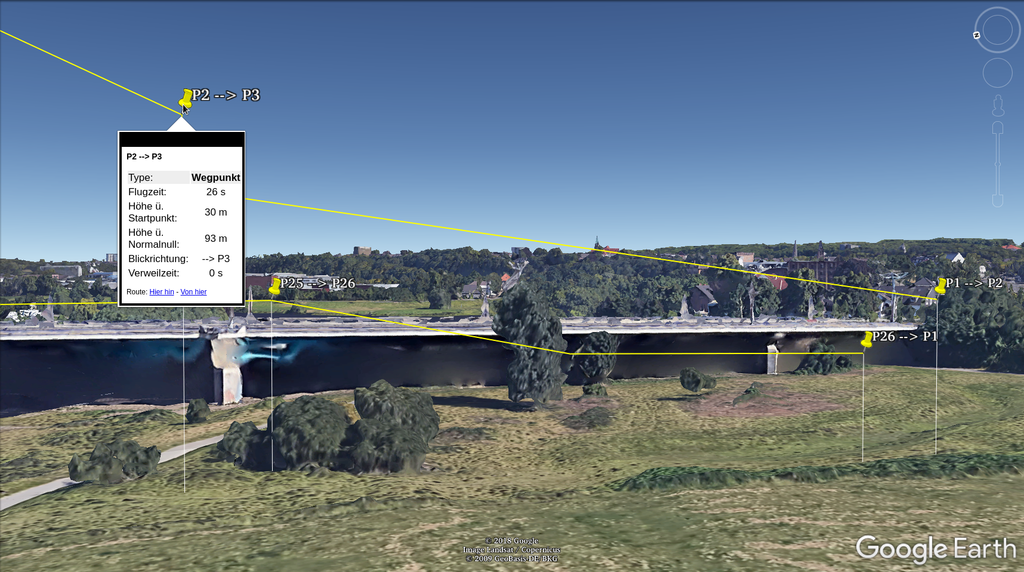
Wegpunkt 2
Der Name eines Wegpunktes zeigt direkt, wohin der Kopter schaut. Hier "P2 --> P3": Er schaut bei Wegpunkt P2 in Richtung des Wegpunktes P3:
Diese Darstellung soll Fehler vermeiden helfen, die einem die ganze Aufnahme vermurksen können, wenn irgendwo im Datensatz eine falsche Blickrichtung
vorliegt.
Klickt man auf den Punkt erscheint eine kurze Meldung, die sich aber weitgehend selbst erklärt. Nur zu der Höhe muß was gesagt werden:
Höhe über Startpunkt: Wenn die Akkus angeschlossen werden und der Gyro des Kopters kalibriert wird ist das für ihn die Höhe 0. Von dieser
Höhe aus werden die Höhenangaben aus dem Koptertool addiert. Oder subtrahiert, ich habe so einen Flug in einem hügeligen Gelände schon
gemacht. Tricky! :-)
Zur Darstellung in
Google Earth
braucht man aber die tatsächliche Höhe, d.h. die Höhe des Startpunktes über Normalnull. Diese zu ermitteln ist aber kein Problem, jedes Handy kann das mittlerweile. Google Earth kann's aber auch. Wie? Ermittlung Höhe des Startpunktes über Normalnull mit Google Earth
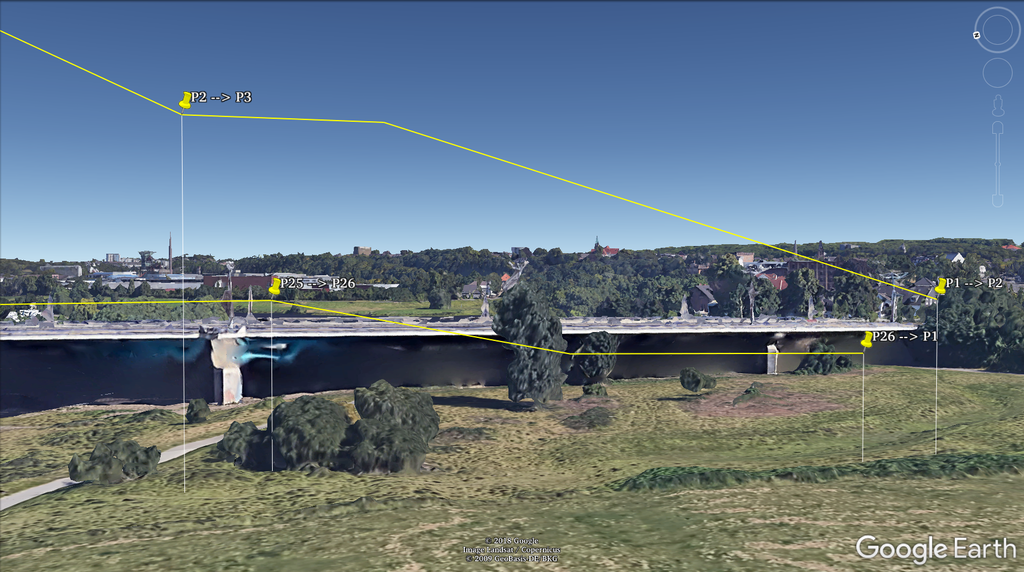
Weiter geht's mit dem Knick im Flugpfad:
Kleine ClimbRate (hier: ClimbRate=7)
Dies passiert dann, wenn als ClimbRate ein Wert eingetragen wird, der den Kopter so steigen läßt, dass er die Position des nächsten
Wegpunktes erreicht bevor er auf die angegebene Höhe gestiegen ist. Er bleibt dann auf der Position stehen und steigt bis er die Höhe erreicht.
Dann fliegt er weiter.
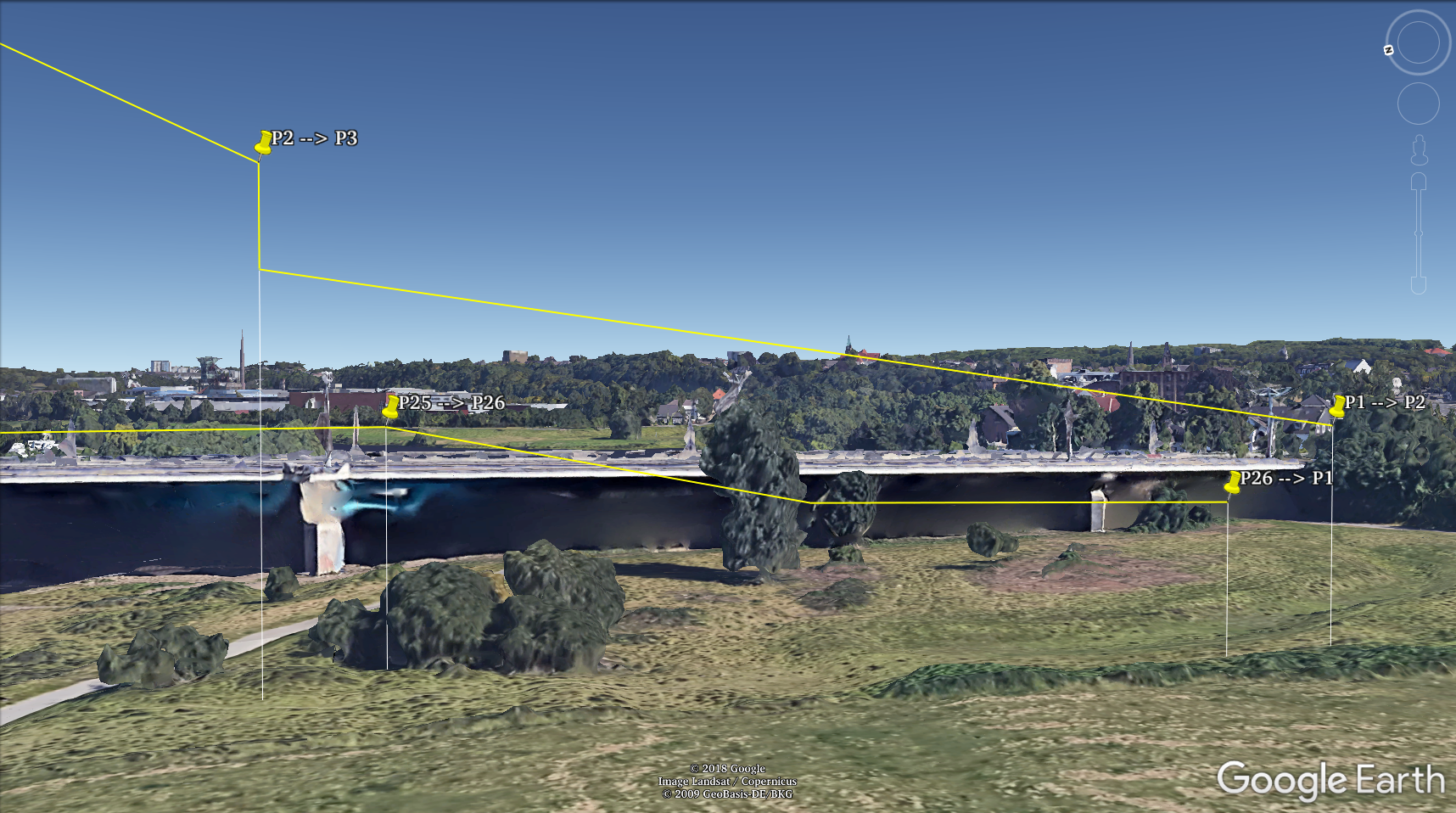
Große ClimbRate (hier: ClimbRate=17)
Andersrum geht's auch: Der Kopter erreicht zuerst die Höhe. Er fliegt dann auf dieser Höhe bis zum Wegpunkt:
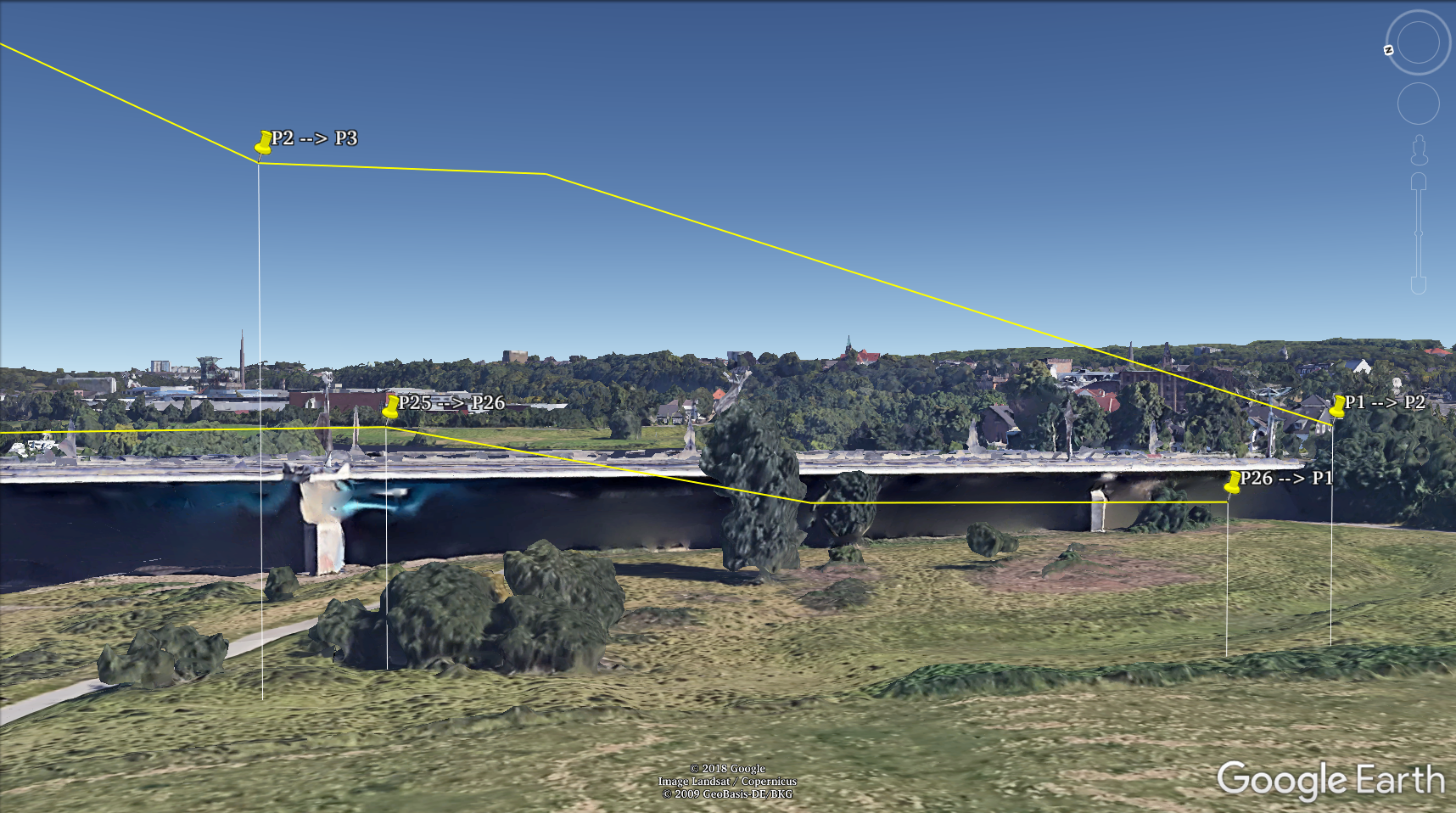
Automatische ClimbRate (hier: ClimbRate=255)
Und das ist der Flugpfad mit automatischer ClimbRate: Der Kopter ermittelt die zum nächsten Wegpunkt passende Steigrate selbst und erreicht ihn gradlinig:

Analog zum Steigflug verhält sich der Sinkflug.
kml-Datei erzeugen
So, nun aber zur Erzeugung Eurer kml-Dateien: kml-Datei erzeugen.
Wer keine Wegpunktdatei des Koptertools zur Hand hat
kann zum Ausprobieren die des Wegpunktfluges über den Ruhrbogen verwenden (Startpunkthöhe ist "63").
Und meldet Euch bitte, wenn es Problem gibt. Meist sind nur kleine Änderungen notwendig, damit auch Sonderfälle funktionieren:
Problemmeldung
28.12.2019 • Tools & Projekte • Dirk Schimansky • Impressum